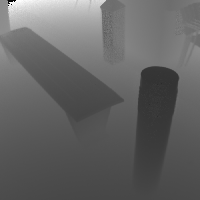
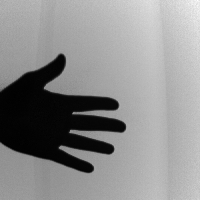
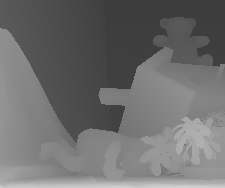
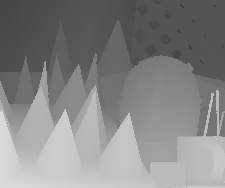
Output Image
|
Input Image

|
To switch between images please use the buttons on the right.
The methods that are available for comparison are using the following color code:
| Our Result |
| Freeman and Liu |
| Nearest Neighbour |
| Bicubic |
| SCSR |
| Q. Yang et al. |
| Bilateral and NN |
| Input 3D |
| Our Result - Brown: Using the Brown Range Database instead of synthetic data |
| Upsampling First: Patching is performed at high resolution, like in image approaches |
| Ground Truth |
Output Image
|
|
Input Image
|
Output Image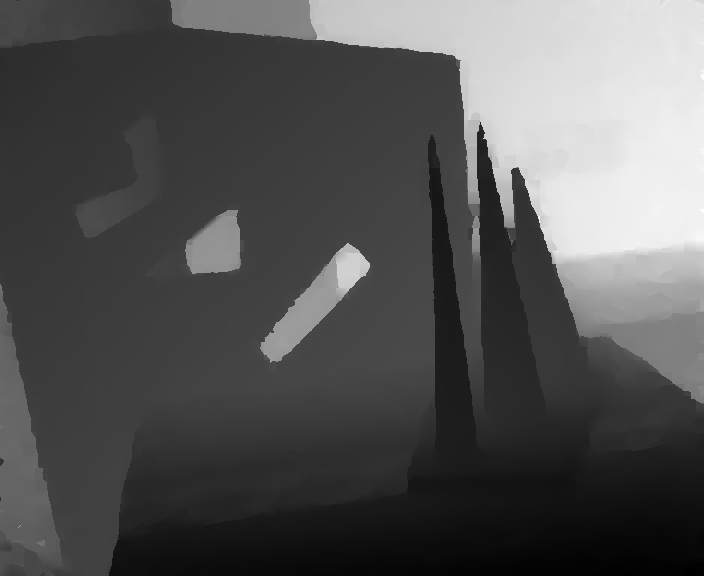
|
Input Image
|
Output Image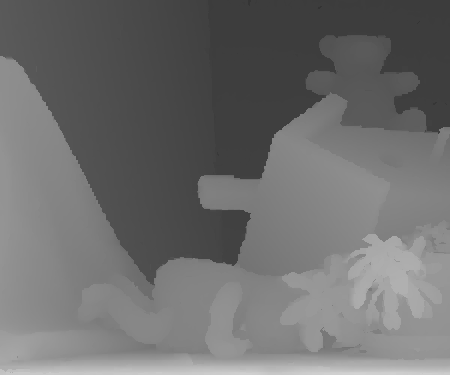
|
Input Image
|
Output Image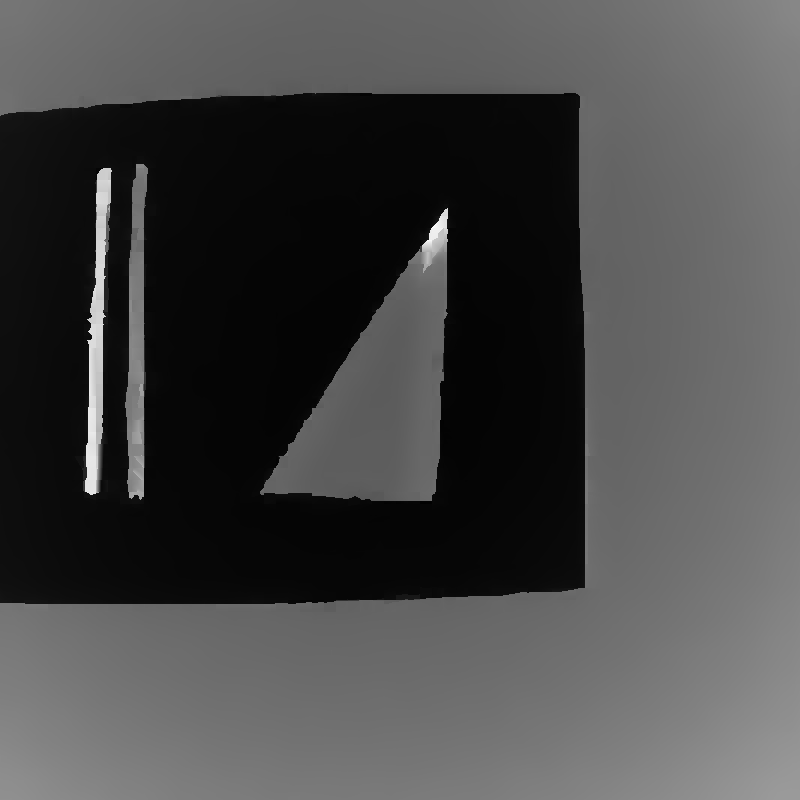
|
Input Image
|
Output Image
|
Input Image

|
Output Image
|
Input Image

|
Output Image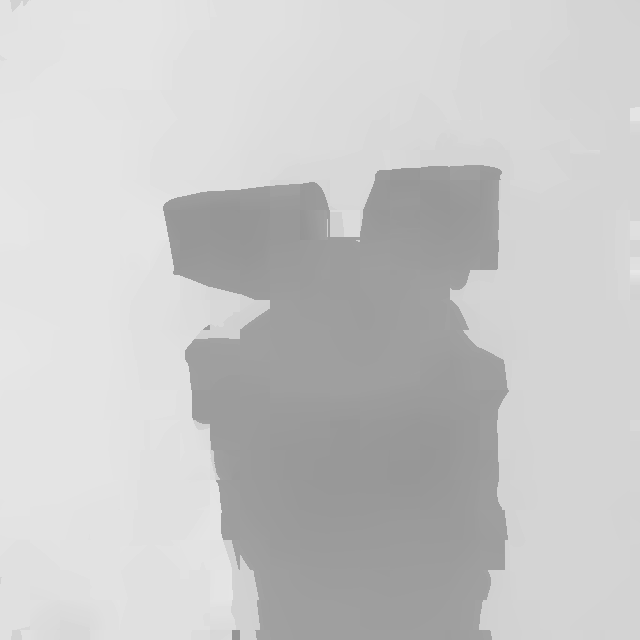
|
Input Image

|
Output Image
|
Input Image

|
Output Image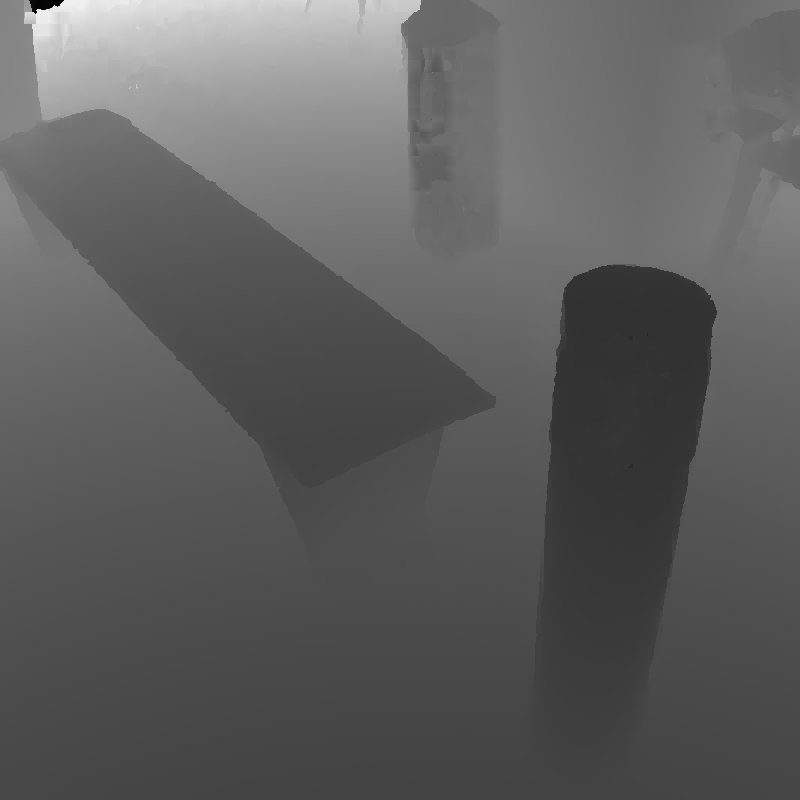
|
Input Image
|
Output Image
|
Input Image
|
Output Image
|
Input Image

|
Output Image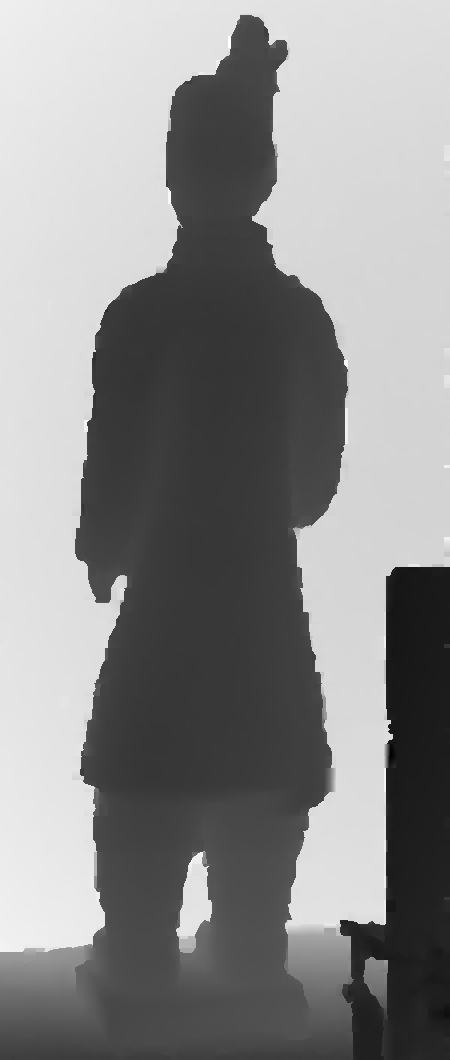
|
Input Image

|
Output Image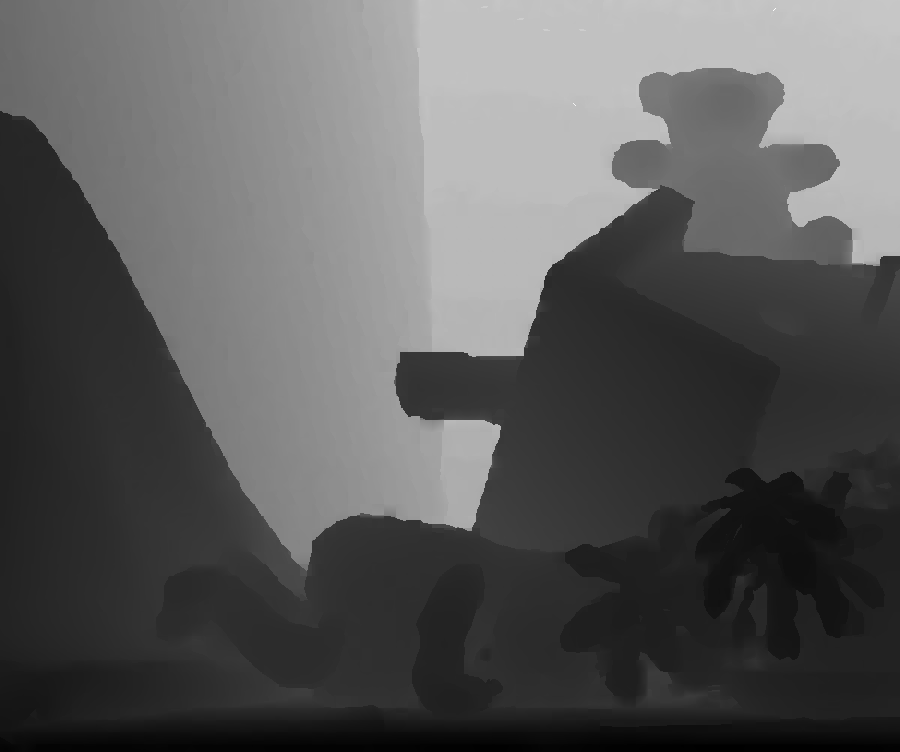
|
Input Image
|
Output Image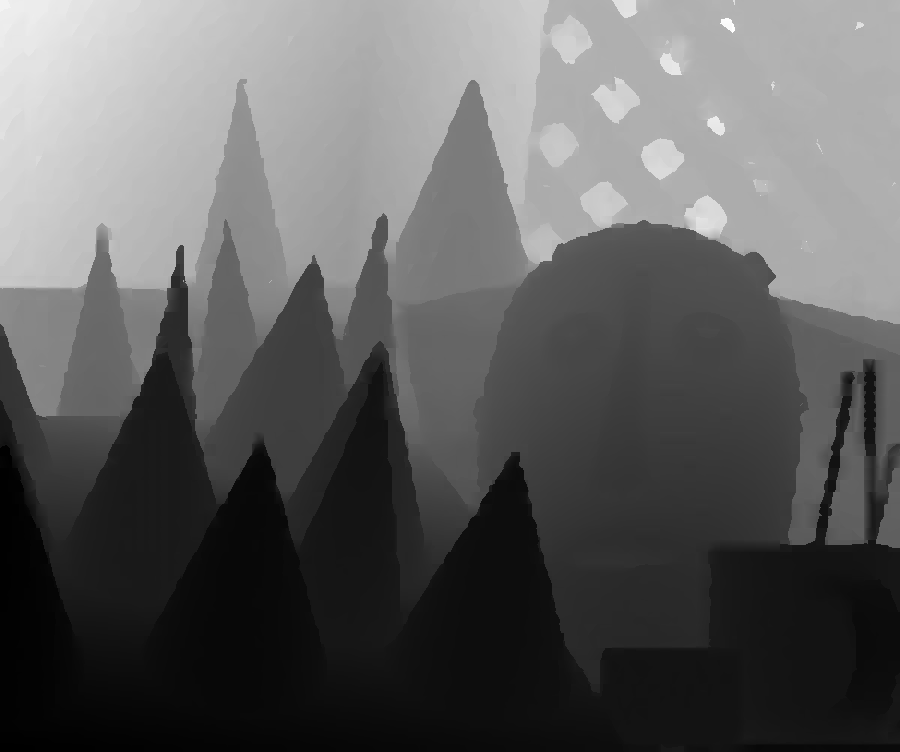
|
Input Image
|
| Scene ID | Sensor Type | Preprocessing | Credits |
| 1 | PMD CamCube 2 | Bilateral Filter [5,3,0.1] | |
| 2 | Swiss Ranger 3000 ToF | Bilateral Filter [5,1.5,0.01] | [23] Schuon et al. - Lidarboost |
| 3 | Structured Light | [21] Scharstein et al. - Middlebury Stereo Dataset | |
| 4 | PMD CamCube 2 | Bilateral Filter [5,1.5,0.01] | |
| 5 | Kinect | Gaussian Blur [3 0.5] | |
| 6 | Canesta EP DevKit | Bilateral Filter [5,3,0.1] | [31] Q. Yang et al. |
| 7 | Canesta EP DevKit | Bilateral Filter [5,3,0.1] | [31] Q. Yang et al. |
| 8 | PMD CamCube 2 | Bilateral Filter [5,1.5,0.01] | |
| 9 | PMD CamCube 2 | Bilateral Filter [5,1.5,0.01] | |
| 10 | PMD CamCube 2 | Bilateral Filter [5,3,0.1] | |
| 11 | PMD CamCube 2 | Bilateral Filter [5,3,0.1] | |
| 12 | Laser Scanner | ||
| 13 | Structured Light | [21] Scharstein et al. - Middlebury Stereo Dataset | |
| 14 | Structured Light | [21] Scharstein et al. - Middlebury Stereo Dataset |